 Tlačiť
TlačiťStránka sa načítava, prosím čakajte…
© 2005 – 2024 Roman Horváth, všetky práva vyhradené. Dnes je 27. 4. 2024.
Dátum: 20. 4. 2020, pred štyrmi rokmi
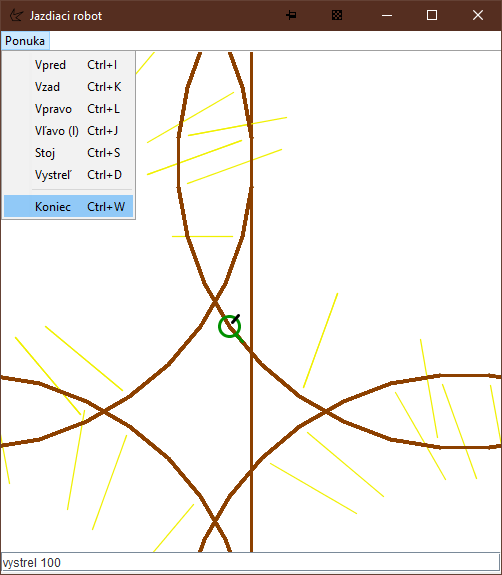
Tento príklad demonštruje tieto koncepty:
- položky ponuky a základnú prácu s nimi,
- vstupný riadok a spracovanie jeho obsahu,
- generovanie zvukov (a ukladanie vygenerovaného obsahu do súboru),
- neštandardné ovládanie robota (základný pohyb robota):
- položkami ponuky a ich klávesovými skratkami (Ctrl + «kláves»),
- príkazmi zadávanými prostredníctvom vstupného riadka.
~
import knižnica.*;
import static knižnica.Svet.*;
import static knižnica.Kláves.*;
import static knižnica.ÚdajeUdalostí.*;
public class JazdiaciRobot extends GRobot
{
// Konštanty prehrávania tónov…
// Frekvencia najnižšieho tónu:
private final static int najnižšíTón = 212;
// Frekvenčný „odstup“ tónov:
private final static int odstupTónov = 128;
// Počet tónov v sérii:
private final static int početTónov = 40;
// Násobok hlasitosti (spolu s počtom tónov určia mieru útlmu
// hlasitosti tónov):
private final static double útlmTónov = 0.025;
// Trvanie prehrávania jednotlivých tónov:
private final static double trvanieTónov = 0.0025;
// Deklarácie položiek ponuky:
private final PoložkaPonuky vpred;
private final PoložkaPonuky vzad;
private final PoložkaPonuky vpravo;
private final PoložkaPonuky vľavo;
private final PoložkaPonuky stoj;
private final PoložkaPonuky vystreľ;
// Deklarácia zvuku:
private final Zvuk zvuk;
// Deklarácie atribútov slúžiacich na spracovanie príkazov:
private final StringBuffer príkaz = new StringBuffer();
private double parameter = 0.0;
// Konštruktor.
private JazdiaciRobot()
{
// Zmení rozmery plátna:
super(500, 500, "Jazdiaci robot ");
// Inicializácia položiek ponuky:
vpred = new PoložkaPonuky("Vpred", VK_D, VK_I);
vzad = new PoložkaPonuky("Vzad", VK_Z, VK_K);
vpravo = new PoložkaPonuky("Vpravo", VK_P, VK_L);
vľavo = new PoložkaPonuky("Vľavo (l)", VK_L, VK_J);
stoj = new PoložkaPonuky("Stoj", VK_S, VK_S);
vystreľ = new PoložkaPonuky("Vystreľ", VK_T, VK_D);
// Čítanie alebo generovanie zvuku:
zvuk = dajZvuk();
// Nastavenia sveta:
aktivujHistóriuVstupnéhoRiadka();
neskrývajVstupnýRiadok();
začniVstup();
zbaľ();
// Nastavenia robota:
farba(tmavohnedá);
hrúbkaPera(3);
ohranič();
// Spustenie…
spustiČasovač(0.04);
prekresli();
}
// Táto metóda prečíta alebo vyrobí zvuk výstrelu. Ak by bol disk
// chránený proti zápisu alebo by nastalo iné zlyhanie, tak by sa
// zvuk generoval vždy na požiadanie a to metódou generujZvuk.
private Zvuk dajZvuk()
{
// Ak zvuk nejestvuje, vygenerujeme ho:
if (!Súbor.jestvuje("laser.wav"))
{
// Krátke naladenie generátora (neúspešný pokus o to, aby bol
// vygenerovaný zvuk stále rovnaký; generátor zvukov je veľmi
// citlivý na predchádzajúci stav, takže každý uložený zvuk
// bude odlišný):
hrajTón(najnižšíTón + odstupTónov * početTónov); čakaj(0.750);
zastavTón(); čakaj(0.300);
// Generovanie a uloženie zvuku:
if (otvorSúborNaUloženieTónu("laser.wav"))
{
for (int i = početTónov; i >= 0; --i)
{
hrajTón(najnižšíTón + odstupTónov * i, i * útlmTónov);
čakaj(trvanieTónov);
}
zastavTón();
čakaj(0.200);
if (!zavriSúborNaUloženieTónu())
// Vypíše upozornenie na štandardnom chybovom výstupe:
System.err.println("Súbor zvuku sa " +
"nepodarilo zapísať.");
}
else
// Vypíše upozornenie na štandardnom chybovom výstupe:
System.err.println("Súbor na zápis zvuku " +
"sa nepodarilo otvoriť.");
}
try
{
// Prečítanie zvuku:
return čítajZvuk("laser.wav");
}
catch (Throwable t)
{
// Vypíše podrobné hlásenie na štandardnom chybovom výstupe:
t.printStackTrace();
// V prípade zlyhania vráti null:
return null;
}
}
// Metóda, ktorá by generovala zvuk, keby ho nebolo možné prečítať
// z pevného disku.
private void generujZvuk()
{
// (Generátor je citlivý na predchádzajúci stav, takže každý
// nový zvuk bude mierne odlišný od predchádzajúceho.)
for (int i = početTónov; i >= 0; --i)
hrajTón(najnižšíTón + odstupTónov * i,
i * útlmTónov, trvanieTónov);
}
// Príkaz vystreľ prijíma jeden parameter, ktorý znamená vzdialenosť
// dostrelu. Metóda nakreslí žltú čiaru a ak bol úspešne prečítaný
// zvuk, prehrá ho, ak nebol, vygeneruje zakaždým nový unikátny.
private void vystreľ(double parameter)
{
if (null == zvuk) generujZvuk(); else zvuk.prehraj();
Bod poloha = poloha();
Farba farba = farba();
double smer = smer();
double hrúbkaPera = hrúbkaPera();
farba(svetložltá);
hrúbkaPera(hrúbkaPera / 2.5);
vľavo(10 * uhlováRýchlosť());
skoč();
vpred(parameter);
hrúbkaPera(hrúbkaPera);
smer(smer);
farba(farba);
poloha(poloha);
}
// Metóda pomáhajúca pri rozpoznávaní príkazov.
private boolean príkazSaZačína(String začiatok)
{
int length = začiatok.length();
if (príkaz.length() < length) return false;
for (int i = 0; i < length; ++i)
if (príkaz.charAt(i) != začiatok.charAt(i)) return false;
return true;
}
// Metóda majúca na starosti rozpoznávanie príkazov a ich parametrov.
private boolean rozpoznajPríkaz(String rozpoznaj) throws Exception
{
if (príkazSaZačína(rozpoznaj))
{
try
{
// Parameter je povinný:
parameter = Double.parseDouble(
príkaz.substring(1 + rozpoznaj.length()));
return true;
}
catch (Exception e)
{
throw new Exception("Nesprávny parameter!");
}
}
return false;
}
// Súkromná metóda slúžiaca na spracovanie príkazov. Toto riešenie
// poskytuje vyššiu univerzálnosť, lebo príkazy môžu prúdiť aj
// z iného zdroja, než vstupný riadok.
private void spracujPríkaz(String reťazec)
{
// Nastavenie hodnoty atribútu príkaz, ktorý bude v ďalšom bloku
// try-catch opakovane využívaný. V OOP sa takýmto spôsobom
// vyhýbame zbytočnému posielaniu parametrov medzi súkromnými
// metódami. (Toto riešenie nie je bezpečné pri viacvláknových
// programoch, nie je tzv. thread-safe, ale dá sa relatívne
// jednoducho zabezpečiť. Tento program nie je v súvislosti so
// spracovaním príkazov viacvláknový.)
príkaz.setLength(0);
príkaz.append(reťazec.toLowerCase());
// Test, či je aktuálny príkaz neprázdny:
if (0 != príkaz.length())
try
{
// Rozpoznávanie a vykonávanie príkazov…
if (rozpoznajPríkaz("vpred")) vpred(parameter);
else if (rozpoznajPríkaz("vzad")) vzad(parameter);
else if (rozpoznajPríkaz("vystreľ") ||
rozpoznajPríkaz("vystrel")) vystreľ(parameter);
else if (rozpoznajPríkaz("vpravo")) vpravo(parameter);
else if (rozpoznajPríkaz("vľavo") ||
rozpoznajPríkaz("vlavo")) vľavo(parameter);
else if (rozpoznajPríkaz("vpravo")) vpravo(parameter);
else if (rozpoznajPríkaz("rýchlosť") ||
rozpoznajPríkaz("rychlost")) rýchlosť(parameter);
else if (rozpoznajPríkaz("rotácia") ||
rozpoznajPríkaz("rotacia") || rozpoznajPríkaz("rotuj"))
uhlováRýchlosť(parameter);
else chyba("Neznámy príkaz!");
}
catch (Exception e)
{
// Táto chyba nastáva pri zadaní nečíselného parametra:
chyba(e.getMessage());
}
}
// Potvrdenie údajov jednoducho vykoná vyššie definovanú metódu
// s reťazcom prevzatým zo vstupného riadka:
@Override public void potvrdenieÚdajov()
{
spracujPríkaz(prevezmiReťazec());
}
// Kreslenie vlastného tvaru, ktorý odzrkadľuje aktuálny smer aj uhlovú
// rýchlosť.
@Override public void kresliTvar()
{
farba(tmavozelená);
kružnica();
skoč();
vpred();
domov();
farba(čierna);
vľavo(10 * uhlováRýchlosť());
skoč(5);
vpred();
}
// Spracovanie príkazov položiek ponuky (ktoré sú zároveň sprístupnené
// prostredníctvom klávesových skratiek – ovládanie klávesovými skratkami
// sa odlišuje od ovládania príkazmi; napriek tomu nie sú v príkrom
// rozpore, vedia fungovať nezávisle od seba, ale ich rozdielnosť by
// určite miatla neinformovaného používateľa, preto sa takéto riešenia
// softvéru neodporúčajú ; tu však slúžia na ukážku dvoch rôznych
// prístupov).
@Override public void voľbaPoložkyPonuky()
{
// (Väčšina volieb je samovysvetľujúcich.)
if (vpred == položkaPonuky())
{
rýchlosť(rýchlosť() + 0.25);
}
else if (vzad == položkaPonuky())
{
rýchlosť(rýchlosť() - 0.25);
}
else if (stoj == položkaPonuky())
{
// Vlastné riešenie zastavenia formou postupného spomaľovania
// (zrýchlenie je resetované v reakcii na zastavenie):
if (rýchlosť() > 0)
zrýchlenie(-0.5);
else
zrýchlenie(0.5);
zastavPoSpomalení();
// Keby sme pohyb riešili prostredníctvom zrýchlenia
// a maximálnej rýchlosti, tak by na tomto mieste stačilo
// uviesť príkaz: zabrzdi();
}
else if (vystreľ == položkaPonuky())
{
vystreľ(60);
}
else if (vpravo == položkaPonuky())
{
uhlováRýchlosť(uhlováRýchlosť() - 0.5, false);
prekresli();
}
else if (vľavo == položkaPonuky())
{
uhlováRýchlosť(uhlováRýchlosť() + 0.5, false);
prekresli();
}
}
// Reakcia na zastavenie.
@Override public void zastavenie()
{
// Nastaví nulové zrýchlenie, aby sa zrušil prípadný
// efekt položky ponuky stoj.
zrýchlenie(0, false);
}
// Hlavná metóda.
public static void main(String[] args)
{
new JazdiaciRobot();
}
}
|