Stránka sa načítava, prosím čakajte…
© 2005 – 2024 Roman Horváth, všetky práva vyhradené. Dnes je 24. 4. 2024.
Dátum: 26. 10. 2013, pred viacerými rokmi, aktualizované: 31. 7. 2020, pred štyrmi rokmi
Tento projekt ukazuje definície tried dvoch typov postavičiek s vlastnou fyzikou. Projekt je postavený na báze programovacieho rámca grafického robota. ") Viac podrobností nájdete v Javadoc komentároch jednotlivých tried.
Viac podrobností nájdete v Javadoc komentároch jednotlivých tried.
Okno aplikácie tesne po spustení. (Obidve postavičky sa prekrývajú.)
Kročko prešiel mierne hore a doprava. Skočko je práve aktívny.
![]() Zdrojové súbory projektu na prevzatie:
Zdrojové súbory projektu na prevzatie: postavicky.7z 4,43 kB (4,33 KiB), 31. 7. 2020
~
import knižnica.*;
/**
* V tomto ukážkovom projekte sú naprogamované dve postavičky s odlišným
* správaním. Medzi ovládaním jednej a druhej sa dá prepínať kliknutím myši.
* Keď je jedna postavička aktívna, druhá je deaktivovaná (a „zmrazená“).
* To je indikované ich farbou (a miernou zmenou grafiky): čierna znamená
* aktivitu, šedá neaktívnosť.
*
* Obe sú (v prípade, že sú aktívne) ovládané kurzorovými šípkami, ale každá
* z nich akoby jestvovala v odlišnom svete.
*
* Jedna je skákajúca (skočko) – pohybuje sa do strán, skáče a vplyvom
* gravitácie padá smerom nadol (až po spodný okraj viditeľnej časti plátna).
*
* Druhá sa pohybuje po obrazovke do všetkých štyroch smerov (kročko) – akoby
* po ploche snímanej zhora.
*
* Priestor pohybu obidvoch postavičiek je obmedzený na viditeľnú časť sveta
* (okna aplikácie). Skúste meniť veľkosť okna aplikácie po spustení.
*/
public class HlavnáTrieda extends GRobot
{
// Inštancie postavičiek skočko a kročko:
private final Skočko skočko = new Skočko();
private final Kročko kročko = new Kročko();
// Konštruktor hlavnej triedy – inicializuje aplikáciu.
private HlavnáTrieda()
{
skry();
kročko.aktivuj();
}
// Reakcia na kliknutie tlačidlom myši.
@Override public void klik()
{
if (skočko.aktívny())
{
Svet.pípni();
skočko.deaktivuj();
kročko.aktivuj();
}
else
{
Svet.pípni();
skočko.aktivuj();
kročko.deaktivuj();
}
}
// Reakcia na stlačenie klávesu.
@Override public void stlačenieKlávesu()
{
if (skočko.aktívny())
{
// Ovládam skočka šípkami doľava a doprava. (Výskok je úmyselne
// naprogramovaný tak, aby reagoval iba na uvoľnenie klávesu,
// aby hráčovi na skákanie nestačilo mať stlačený medzeník.)
switch (ÚdajeUdalostí.kláves())
{
case Kláves.VĽAVO: skočko.choďVľavo(); break;
case Kláves.VK_RIGHT: skočko.choďVpravo(); break;
}
}
if (kročko.aktívny())
{
// Šípkami ovládam aj kročka, ale len keď stojí.
//
// Pozor! Toto obmedzenie spôsobuje „zasekávanie“ pri snahe
// o náhlu zmenu smeru, ale je fyzikálne správnejšie.
//
// Poznámky: Keď chceme (napriek fyzikálnej správnosti)
// obmedzenie brániace náhlym zmenám smeru kročka odstrániť,
// stačí dať nasledujúci riadok do komentára. Správanie kročka
// začne pripomínať rozprávkovú veveričku, ktorá vypila priveľa
// kávy. Kročko bude ignorovať svoj moment hybnosti, čo sa bude
// prejavovať náhlymi zmenami smeru a „tvrdohlavým“ úsilím
// o prekonanie bariér okrajov.
if (kročko.stojím())
{
switch (ÚdajeUdalostí.kláves())
{
case Kláves.VK_LEFT: kročko.choďVľavo(); break;
case Kláves.VK_RIGHT: kročko.choďVpravo(); break;
case Kláves.VK_UP: kročko.choďHore(); break;
case Kláves.VK_DOWN: kročko.choďDole(); break;
}
}
}
}
// Reakcia na uvoľnenie klávesu.
@Override public void uvoľnenieKlávesu()
{
if (skočko.aktívny())
{
switch (ÚdajeUdalostí.kláves())
{
// Šípky skočka zastavujú.
case Kláves.VK_LEFT:
case Kláves.VK_RIGHT:
skočko.stoj();
break;
// Kláves medzera sa pokúsi o skok. To, či skok nastane,
// alebo nie závisí od splnenia podmienok v metóde vyskoč().
case Kláves.MEDZERA:
skočko.vyskoč();
break;
}
}
if (kročko.aktívny())
{
switch (ÚdajeUdalostí.kláves())
{
// Uvoľnenie klávesu šípky prikáže kročkovi, aby zastavil.
case Kláves.VK_LEFT:
case Kláves.VK_RIGHT:
case Kláves.VK_UP:
case Kláves.VK_DOWN:
kročko.stoj();
break;
// (Poznámka: Posledný break riadiacej štruktúry switch
// nie je nikdy potrebný. Ak je uvedený, neplní žiadnu
// funkciu, ale aj tak je odporúčané ho uvádzať, aby sa
// nezabudlo na jeho pridanie pri prípadnom rozširovaní
// tela riadiacej štruktúry.)
}
}
}
// Hlavná metóda (vstupný bod programu).
public static void main(String[] args) { new HlavnáTrieda(); }
}
~
import knižnica.*;
/**
* Táto trieda pokytuje spoločný základ pre obidve postavičky. Obsahuje
* definíciu kreslenia vlastného tvaru, ktorý je iný pre aktívnu a neaktívnu
* postavičku a v predvolenom konštruktore je príkaz na zdvihnutie pera
* grafického robota, od ktorého je trieda odvodená.
*/
public class Postavička extends GRobot
{
// Statická inštancia kreslenia tvaru bude spoločná pre všetky
// postavičky, nech by ich bolo vytvorené ľubovoľné množstvo.
private final static KreslenieTvaru vlastnýTvar = r ->
{
if (r.aktívny())
{
r.kružnica(10);
r.skoč(12);
r.kruh(8);
r.domov();
r.vpravo(30);
r.dopredu(8);
r.vpravo(60);
r.dopredu(8);
r.domov();
r.vľavo(30);
r.dopredu(8);
r.vľavo(60);
r.dopredu(8);
}
else
{
r.farba(šedá);
r.kružnica(10);
r.dopredu(12);
r.kružnica(8);
}
};
// Predvolený konštruktor
public Postavička()
{
zdvihniPero();
vlastnýTvar(vlastnýTvar);
}
}
~
import knižnica.*;
/**
* Trieda definujúca fyziku pre kráčajúcu postavičku.
*/
class Kročko extends Postavička
{
// Prídavné vlastnosti postavičky:
// – rýchlosť v,
// – zrýchlenie a.
private int v, a;
// Jednoduchý konštruktor resetujúci hodnoty prídavných vlastností
// postavičky.
public Kročko()
{
v = a = 0;
}
// Metóda starajúca sa o fyziku postavičky.
@Override public void aktivita()
{
if (a != 0)
{
// Nenulové zrýchlenie mení rýchlosť.
v += a;
// Ak je rýchlosť menšia než nula (klesne pod nulu pri
// spomaľovaní), …
if (v < 0)
{
// … tak zastavím postavičku úplne, …
v = a = 0;
}
// … inak (pri zrýchľovaní) obmedzím rýchlosť na max. 20
// (bodov za tik).
else if (v > 20) v = 20;
}
// Posun postavičky dopredu o aktuálnu hodnotu rýchlosti.
dopredu(v);
// Nasledujú testy a ošetrenia proti presiahnutiu hraníc obrazovky.
//
// Principiálne (komentáre, ktoré platia pre všetky štyri smery):
//
// // Ak súradnica x prekročí ľavú hranicu, …
// if (polohaX() < Svet.ľavýOkraj())
// {
// // … tak presuniem robot naspäť na túto hranicu, …
// polohaX(Svet.ľavýOkraj());
// // … obrátim ho čelom vzad …
// vpravo(180);
// // … a nechám ho spomaľovať (nastavím záporné zrýchlenie).
// a = -1;
// }
//
// (Podobne to platí pre všetky štyri smery, pričom nižšie sú
// protiľahlé okraje spárované.)
if (polohaX() < Svet.ľavýOkraj())
{
polohaX(Svet.ľavýOkraj());
vpravo(180);
a = -1;
}
else if (polohaX() > Svet.pravýOkraj())
// (Ľavý a pravý okraj sú spárované do jednej štruktúry if-else.)
{
polohaX(Svet.pravýOkraj());
vpravo(180);
a = -1;
}
if (polohaY() < Svet.spodnýOkraj())
{
polohaY(Svet.spodnýOkraj());
vpravo(180);
a = -1;
}
else if (polohaY() > Svet.hornýOkraj())
// (Rovnako spodný a horný okraj.)
{
polohaY(Svet.hornýOkraj());
vpravo(180);
a = -1;
}
}
// Ovládanie postavičky stanovením smerov a kladného zrýchlenia.
public void choďVpravo() { smer(0); a = 1; }
public void choďHore() { smer(90); a = 1; }
public void choďVľavo() { smer(180); a = 1; }
public void choďDole() { smer(270); a = 1; }
// Zastavenie postavičky určením záporného zrýchlenia.
// (Postavičku nezastavíme len tak „zrazu“ – necháme ju spomaľovať.)
public void stoj() { a = -2; }
// Overenie, či postavička stojí.
// (Keď je rýchlosť rovná nule, postava určite stojí.)
public boolean stojím() { return v == 0; }
}
~
import knižnica.*;
/**
* Trieda definujúca fyziku pre skákajúcu postavičku.
*/
class Skočko extends Postavička
{
// Prídavné vlastnosti postavičky:
// – horizontálna rýchlosť vx,
// – vertikálna rýchlosť vy,
// – horizontálne zrýchlenie ax.
// (Poznámka: Vertikálne zrýchlenie je konštantné.)
private int vx, vy, ax;
// Jednoduchý konštruktor resetujúci hodnoty prídavných vlastností
// postavičky.
public Skočko()
{
vx = vy = ax = 0;
}
// Metóda starajúca sa o fyziku postavičky.
@Override public void aktivita()
{
// Riešenie pohybu a obmedzení vo vodorovnom smere
// -----------------------------------------------
if (ax != 0)
{
// V prípade, že je zrýchlenie nenulové, postavička plynule
// akceleruje.
vx += ax;
// Obmedzenie maximálnej rýchlosti na ±15 (bodov za tik):
if (vx > 15) vx = 15;
else if (vx < -15) vx = -15;
}
else
{
// V prípade, že je zrýchlenie nulové, postavička spomaľuje
// (hodnota rýchlosti sa posúva smerom k nule).
if (vx > 0) --vx;
else if (vx < 0) ++vx;
}
// Príkaz posuňVpravo posúva robot kolmo na jeho smer. Predvolene
// je smer robota nastavený na 90°, čo je hore. So smerom tohto
// robota nikde nemanipulujeme, čiže jeho smer zostáva stále na
// hodnote 90°. Preto príkaz posuňVpravo mení vodorovnú polohu
// podľa rýchlosti vx (pri kladnej hodnote je to doprava, pri
// zápornej doľava).
posuňVpravo(vx);
// Ak robot narazí na ľavý okraj, odrazí sa (a postupne zastaví).
if (polohaX() < Svet.ľavýOkraj())
{
polohaX(Svet.ľavýOkraj());
vx = -vx; ax = 0;
}
// To isté platí pre pravý okraj.
else if (polohaX() > Svet.pravýOkraj())
{
polohaX(Svet.pravýOkraj());
vx = -vx; ax = 0;
}
// Riešenie pohybu a obmedzení v zvislom smere
// --------------------------------------------
// Robot stále gravitačne padá, takže vertikálna rýchlosť plynule
// klesá po minimálnu hodnotu -15 (bodov za tik). To znamená, že
// tento robot má tzv. terminálnu rýchlosť (padania) 15 bodov za tik.
if (vy > -15) --vy;
// Podobne ako to je pri príkaze posuňVpravo (pozri vyššie) to platí
// tu pri príkaze dopredu. Ním meníme zvislú polohu robota s pomocou
// rýchlosti vy. Ak je vertikálna rýchlosť kladná, tak je postavička
// vo výskoku – stúpa. Ak je záporná, tak klesá.
dopredu(vy);
// Nasleduje úprava hraníc vo vertikálnom smere.
if (polohaY() < Svet.spodnýOkraj())
{
// Keď postavička narazí na spodnú hranicu, odrazí sa
// a bude chvíľu stúpať (poskočí).
polohaY(Svet.spodnýOkraj());
vy = 10;
}
else if (polohaY() > Svet.hornýOkraj())
{
// Pri hornom okraji obrazovky sa iba zastaví.
polohaY(Svet.hornýOkraj());
vy = 0;
}
}
// Metódy na pridávanie rýchlosti (nastavenie zrýchlenia) postavičky
// v smere do strán. Kladné číslo začne pridávať rýchlosť v smere
// doprava a záporné doľava.
public void choďVpravo() { ax = 1; }
public void choďVľavo() { ax = -1; }
// Zastavenie postavičky. Na nulovú hodnotu zrýchlenie zareaguje fyzika
// postavičky v reakcii aktivita (vyššie).
public void stoj() { ax = 0; }
// Metóda určujúca kedy a ako vysoko môže postavička „vyskočiť.“
// Obmedzenie je nastavené tak, aby skočko mohol vyskočiť len ak sa
// jeho vertikálna rýchlosť nachádza v určitých hraniciach: (−8; 5).
// To znamená, že:
// – ak padá príliš rýchlo, nevyskočí,
// – ak je práve v počiatočnej fáze výskoku, nevyskočí.
public void vyskoč() { if (vy > -8 && vy < 5) vy = 15; }
}
Poznámka: Tento projekt je starší. Bude potrebné ho aktualizovať tak, aby bol kompatibilný (už sa stalo) s najnovšou verziou programovacieho rámca GRobot.
Na tejto stránke je publikovaný ukážkový projekt Postavičky obsahujúci definície hierarchie tried pre dva typy postavičiek s vlastnou fyzikou. Projekt používa skupinu tried grafického robota. Na vygenerovanie prázdneho projektu odporúčam použiť Generátor projektov BlueJ (dostupný v sekcii Softvér na prevzatie).
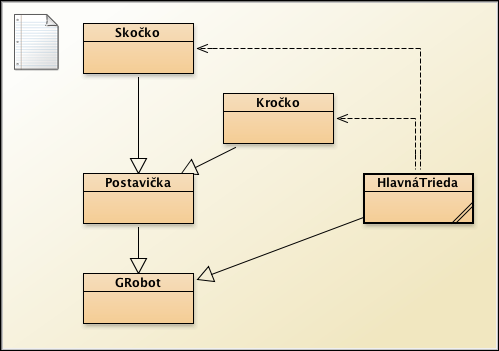
Triedy projektu.
~
/**
* Táto trieda pokytuje spoločný základ pre obidve postavičky. Obsahuje
* definíciu kreslenia vlastného tvaru, ktorý je iný pre aktívnu a neaktívnu
* postavičku a v predvolenom konštruktore je príkaz na zdvihnutie pera
* grafického robota, od ktorého je trieda odvodená.
*/
public class Postavička extends GRobot
{
// Statická inštancia vlastného tvaru bude spoločná pre všetky
// postavičky, nech by ich bolo vytvorených ľubovoľné množstvo.
private final static VlastnýTvar vlastnýTvar = new VlastnýTvar()
{
@Override public void kresli(GRobot r)
{
r.zdvihniPero();
if (r.aktívny())
{
r.hrúbkaPera(2);
r.kružnica(10);
r.dopredu(12);
r.kruh(8);
r.položPero();
r.domov();
r.doprava(30);
r.dopredu(8);
r.doprava(60);
r.dopredu(8);
r.domov();
r.doľava(30);
r.dopredu(8);
r.doľava(60);
r.dopredu(8);
}
else
{
r.farba(šedá);
r.kružnica(10);
r.dopredu(12);
r.kružnica(8);
}
}
};
// Predvolený konštruktor
public Postavička()
{
zdvihniPero();
vlastnýTvar(vlastnýTvar);
}
}
~
/**
* Trieda definujúca fyziku pre kráčajúcu postavičku.
*/
class Kročko extends Postavička
{
// Prídavné vlastnosti postavičky:
// – rýchlosť v,
// – zrýchlenie a,
private int v, a;
// Konštruktor
public Kročko()
{
v = a = 0;
}
// Metóda starajúca sa o fyziku postavičky
@Override public void aktivita()
{
if (a != 0)
{
// Nenulové zrýchlenie mení rýchlosť
v += a;
// Ak je rýchlosť menšia než nula
// (klesne pod nulu pri spomaľovaní)
if (v < 0)
{
// zastavím postavičku úplne.
v = a = 0;
}
// Inak (pri zrýchľovaní) obmedzím
// rýchlosť na max. 20 (bodov za tik).
else if (v > 20) v = 20;
}
dopredu(v);
// Nasledujú testy a ošetrenia proti presiahnutiu hraníc obrazovky,
// principiálne:
//
// // ak súradnica x prekročí ľavú hranicu,
// if (polohaX() < podlaha.ľavýOkraj())
// {
// // presuniem robot naspäť na túto hranicu
// polohaX(podlaha.ľavýOkraj());
// // obrátim ho čelom vzad
// doprava(180);
// // a nechám ho spomaľovať (nastavím záporné zrýchlenie).
// a = -1;
// }
if (polohaX() < podlaha.ľavýOkraj())
{
polohaX(podlaha.ľavýOkraj());
doprava(180);
a = -1;
}
else if (polohaX() > podlaha.pravýOkraj())
{
polohaX(podlaha.pravýOkraj());
doprava(180);
a = -1;
}
if (polohaY() < podlaha.spodnýOkraj())
{
polohaY(podlaha.spodnýOkraj());
doprava(180);
a = -1;
}
else if (polohaY() > podlaha.hornýOkraj())
{
polohaY(podlaha.hornýOkraj());
doprava(180);
a = -1;
}
}
// Ovládanie postavičky stanovením smerov a kladného zrýchlenia.
public void doprava() { smer(0); a = 1; }
public void hore() { smer(90); a = 1; }
public void doľava() { smer(180); a = 1; }
public void dole() { smer(270); a = 1; }
// Zastavenie postavičky určením záporného zrýchlenia.
// (Postavičku nezastavíme len tak „zrazu“ – necháme ju spomaľovať)
public void stoj() { a = -2; }
// Overenie, či postavička stojí.
// (Keď je rýchlosť rovná nule, postava určite stojí…)
public boolean stojím() { return v == 0; }
}
~
/**
* Trieda definujúca fyziku pre skákajúcu postavičku.
*/
class Skočko extends Postavička
{
// Prídavné vlastnosti postavičky:
// – horizontálna rýchlosť vx,
// – vertikálna rýchlosť vy,
// – horizontálne zrýchlenie ax,
private int vx, vy, ax;
// Konštruktor
public Skočko()
{
vx = vy = ax = 0;
}
// Metóda starajúca sa o fyziku postavičky
@Override public void aktivita()
{
// Riešenie pohybu a obmedzení vo vodorovnom smere
// -----------------------------------------------
if (ax != 0)
{
// V prípade, že zrýchlenie je nenulové,
// postavička plynule akceleruje.
vx += ax;
// Obmedzenie maximálnej rýchlosti na ±15 (bodov za tik)
if (vx > 15) vx = 15;
else if (vx < -15) vx = -15;
}
else
{
// V prípade, že je zrýchlenie nulové, postavička spomaľuje
// (posúvam hodnotu rýchlosti smerom k nule).
if (vx > 0) --vx;
else if (vx < 0) ++vx;
}
// Príkaz posuňVpravo posúva robot kolmo na jeho smer
// (predvolene je smer robota nastavený na 90°, čo je hore;
// so smerom tohto robota nikde nemanipulujeme, čiže stále
// zostáva na tejto hodnote; takže príkaz posuňVpravo mení
// vodorovnú polohu podľa rýchlosti vx).
posuňVpravo(vx);
// Ak robot narazí na ľavý okraj, odrazí sa.
// Podobne to platí pre pravý okraj…
if (polohaX() < podlaha.ľavýOkraj())
{
polohaX(podlaha.ľavýOkraj());
vx = -vx; ax = 0;
}
else if (polohaX() > podlaha.pravýOkraj())
{
polohaX(podlaha.pravýOkraj());
vx = -vx; ax = 0;
}
// Riešenie pohybu a obmedzení vo zvislom smere
// --------------------------------------------
// Stále padá, takže vertikálna rýchlosť plynule klesá po
// minimálnu hodnotu -15 (bodov za tik).
if (vy > -15) --vy;
// Podobne ako to bolo s príkazom posuňVpravo, je to aj
// s príkazom dopredu. Ním meníme zvislú polohu robota s pomocou
// rýchlosti vy. Ak je vertikálna rýchlosť kladná, postavička
// je vo výskoku – stúpa…
dopredu(vy);
// Nasleduje úprava hraníc vo vertikálnom smere.
if (polohaY() < podlaha.spodnýOkraj())
{
// Keď postavička narazí na spodnú hranicu, odrazí sa
// a bude chvíľu stúpať (poskočí)…
polohaY(podlaha.spodnýOkraj());
vy = 10;
}
else if (polohaY() > podlaha.hornýOkraj())
{
// Pri hornom okraji obrazovky sa iba zastaví.
polohaY(podlaha.hornýOkraj());
vy = 0;
}
}
// Metódy na pridávanie rýchlosti (nastavenie zrýchlenia) postavičky
// v smere do strán. Kladné číslo začne pridávať rýchlosť v smere
// doprava a záporné doľava.
public void doprava() { ax = 1; }
public void doľava() { ax = -1; }
// Zastavenie postavičky. Na nulové zrýchlenie zareaguje
// fyzika postavičky v metóde pracuj().
public void stoj() { ax = 0; }
// Metóda určujúca kedy a ako vysoko môže postavička „vyskočiť“.
public void skoč() { if (vy > -8 && vy < 5) vy = 15; }
}
~
/**
* V tomto ukážkovom projekte sú naprogamované dve „postavičky“ s odlišným
* správaním. Medzi ovládaním jednej a druhej sa dá prepínať kliknutím myši.
* Obe sú ovládané kurzorovými šípkami. Jedna je skákajúca, druhá sa
* pohybuje do štyroch smerov. Priestor pohybu obidvoch je ohraničený
* viditeľnou časťou lúky, to znamená, že sa smú pohybovať len po viditeľnej
* časti plátna lúky.
*
* Prvá z nich je naprogramovaná tak, že vplyvom gravitácie padá smerom
* nadol až po spodný okraj viditeľného plátna. Kláves medzera jej dovoľuje
* „skákať“. Druhá sa pohybuje po plátne ako po ploche snímanej zhora.
*/
public class HlavnáTrieda extends GRobot
{
// Inštancie postavičiek skočko a kročko
private final Skočko skočko = new Skočko();
private final Kročko kročko = new Kročko();
private HlavnáTrieda()
{
skry();
kročko.aktivuj();
new ObsluhaUdalostí()
{
@Override public void klik() { prepniPostavičku(); }
@Override public void stlačenieKlávesu() { priStlačeníKlávesu(); }
@Override public void uvoľnenieKlávesu() { priUvoľneníKlávesu(); }
};
}
private void prepniPostavičku()
{
if (skočko.aktívny())
{
svet.pípni();
skočko.deaktivuj();
kročko.aktivuj();
}
else
{
svet.pípni();
skočko.aktivuj();
kročko.deaktivuj();
}
}
private void priStlačeníKlávesu()
{
if (skočko.aktívny())
{
// Ovládam skočka šípkami doľava a doprava.
switch (údajeUdalostí.kláves())
{
case Kláves.VĽAVO: skočko.doľava(); break;
case Kláves.VK_RIGHT: skočko.doprava(); break;
}
}
if (kročko.aktívny())
{
// Šípkami ovládam aj kročka, ale len keď stojí.
if (kročko.stojím())
{
switch (údajeUdalostí.kláves())
{
case Kláves.VK_LEFT: kročko.doľava(); break;
case Kláves.VK_RIGHT: kročko.doprava(); break;
case Kláves.VK_UP: kročko.hore(); break;
case Kláves.VK_DOWN: kročko.dole(); break;
}
}
}
}
private void priUvoľneníKlávesu()
{
if (skočko.aktívny())
{
switch (údajeUdalostí.kláves())
{
// Šípky skočka zastavujú.
case Kláves.VK_LEFT:
case Kláves.VK_RIGHT:
skočko.stoj();
break;
// Kláves medzera sa pokúsi o skok.
// To, či skok nastane, závisí od splnenia podmienok
// v metóde skoč().
case Kláves.MEDZERA:
skočko.skoč();
}
}
if (kročko.aktívny())
{
switch (údajeUdalostí.kláves())
{
// Uvoľnenie klávesu šípky prikáže kročkovi, aby zastavil.
case Kláves.VK_LEFT:
case Kláves.VK_RIGHT:
case Kláves.VK_UP:
case Kláves.VK_DOWN:
kročko.stoj();
}
}
}
// Hlavná metóda…
public static void main(String[] args)
{
new HlavnáTrieda();
}
}